유출된 기름을 청소하거나 복잡한 기계를 조립하는 등 긴급한 작업을 완료하기 위해 달려드는 로봇 떼를 상상해 보세요. 처음에는 로봇을 더 추가하면 작업 속도가 빨라집니다. 하지만 어느 시점이 지나면 공간이 붐비고 로봇이 서로 간섭하기 시작하며 전체적인 진행이 느려집니다.
이는 간단하지만 중요한 질문을 제기합니다. 제한된 영역에서 효율성이 떨어지기 전에 얼마나 많은 로봇을 배치할 수 있습니까? 하버드 연구원들은 명확한 답을 찾았다고 믿습니다.
효율성을 높이는 간단한 아이디어
Lola England de Valpine 응용 수학, 유기체 및 진화 생물학, 물리학 교수인 L. Mahadevan 연구실의 새로운 연구에 따르면 로봇이 움직이는 방식에 무작위성을 제어하면 혼잡한 환경에서 혼잡을 줄이고 성능을 향상시킬 수 있다는 사실이 밝혀졌습니다.
이 작업은 수학적 모델링, 컴퓨터 시뮬레이션 및 실제 실험을 결합합니다. 이는 기본적인 지역 이동 규칙이 어떻게 더 큰 규모의 조직적이고 효율적인 결과로 이어질 수 있는지 보여줍니다. 이번 연구 결과는 로봇 차량의 설계 방식에 영향을 미칠 수 있으며 인간 군중 관리 및 교통 흐름에도 적용될 수 있습니다. 이 연구는 미국국립과학원회보(Proceedings of the National Academy of Sciences)에 게재되었으며 응용수학 박사가 주도했습니다. 학생 Lucy Liu와 SEAS 선임 연구원 Justin Werfel의 지도를 받았습니다.
무작위성이 복잡한 행동을 예측하는 데 도움이 되는 이유
Liu는 개인이 수많은 가능한 경로를 택하고 예측할 수 없는 방식으로 상호 작용할 수 있기 때문에 밀집된 군중을 연구하는 것이 어렵다고 설명했습니다. 문제를 단순화하기 위해 연구원들은 각 로봇을 움직임의 작은 조정 가능한 변화량을 갖는 기본 단위로 취급했습니다.
“무작위성이 어떻게 작업을 더 쉽게 만들 수 있기 때문에 이것은 직관에 어긋날 수 있습니다.” 리우가 말했다. “하지만 이 경우 무작위성이 많으면 평균 거리, 평균 시간, 평균 행동 등 평균을 취하는 것이 가능해집니다. 이렇게 하면 예측이 훨씬 쉬워집니다.”
움직이는 로봇 떼 시뮬레이션
이 아이디어를 탐구하기 위해 팀은 에이전트라고 불리는 로봇 그룹의 컴퓨터 시뮬레이션을 만들었습니다. 각 에이전트는 임의의 위치에서 시작되었으며 임의의 목적지가 할당되었습니다. 목표에 도달하면 즉시 새로운 목표를 수신하여 실제 시스템의 지속적인 작업 할당을 모방합니다.
각 에이전트는 “노이즈”라고 설명되는 조정 가능한 변형량을 사용하여 목표를 향해 나아갔습니다. 소음 없이 요원들은 직선으로 움직였다. 소음이 높으면 경로가 불규칙하고 비효율적이 됩니다. 그러나 이러한 방황은 그들이 서로를 탐색하는 데도 도움이 되었습니다.
소음의 “골디락스 존(Goldilocks Zone)” 찾기
시뮬레이션 결과 명확한 패턴이 드러났습니다. 에이전트가 완벽하게 직선 경로로 이동하면 빠르게 빽빽한 클러스터가 형성되고 진행이 중단되는 교통 체증이 발생합니다. 움직임이 너무 불규칙해지면 혼잡은 사라졌으나 과도한 방황으로 인해 효율성이 떨어졌습니다.
연구자들은 이러한 극단 사이에서 최적의 지점을 식별했습니다. 이 범위에서는 요원들이 가끔 서로 부딪쳐 짧은 시간 동안 클러스터를 형성했지만, 그래도 간신히 지나가며 계속 움직였습니다. 이 균형을 통해 시스템은 안정적인 흐름을 유지할 수 있었습니다.
시뮬레이션에서 수학적 모델까지
이러한 통찰력을 사용하여 팀은 “목표 달성률”, 즉 시간이 지남에 따라 도달한 목적지 수를 추정하는 공식을 개발했습니다. 이러한 방정식을 통해 군중 밀도와 이동 무작위성의 이상적인 조합을 결정하여 성능을 극대화할 수 있었습니다.
실제 로봇으로 이론 테스트
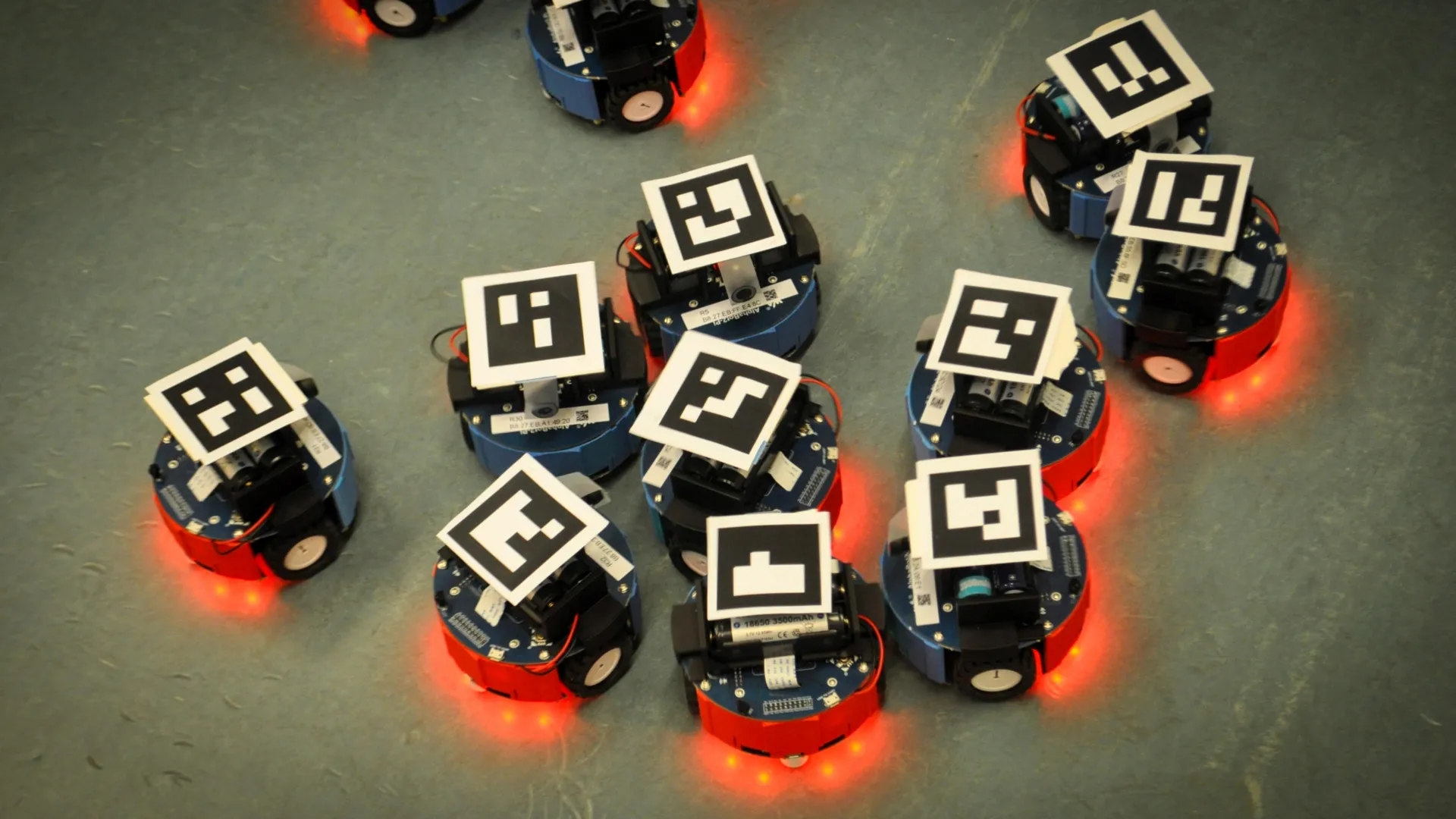
이번 발견을 확인하기 위해 Liu는 네덜란드 아인트호벤 공과대학의 물리학자 Federico Toschi와 협력했습니다. 그들은 머리 위 카메라가 장착된 실험실에서 바퀴가 작은 로봇을 이용한 실험을 함께 시작했습니다.
각 로봇에는 QR 코드가 있어서 로봇의 위치를 추적하고 새로운 목적지로 업데이트할 수 있었습니다. 실제 로봇은 시뮬레이션된 에이전트보다 더 느리고 덜 정확하게 움직이지만 동일한 전체 패턴을 나타냈습니다.
간단한 규칙, 복잡한 결과
실험은 핵심 아이디어를 뒷받침했습니다. 매우 복잡한 조정에는 고급 지능이나 중앙 집중식 제어가 필요하지 않습니다. 대신, 단순한 지역 규칙은 적어도 특정 밀도 제한 내에서 효과적인 그룹 행동을 생성할 수 있습니다.
Mahadevan은 “개미 떼, 동물 무리, 로봇 그룹 등 활동적인 물질이 어떻게 기능을 발휘하고 자기 조직화 원리를 사용하여 혼잡한 환경에서 작업을 수행하는지 이해하는 것은 행동 생태학의 많은 질문과 관련이 있습니다”라고 말했습니다. “우리 연구는 우리가 초점을 맞춘 인스턴스화보다 훨씬 더 광범위한 전략을 제안합니다.”
로봇 공학을 넘어서는 의미
Liu는 오랫동안 더 안전하고 효율적으로 혼잡한 공간을 디자인하는 데 관심을 가져왔다고 말했습니다. 이 연구는 수학적 도구를 사용하여 로봇, 차량, 사람 등 대규모 그룹의 움직임을 예측하고 최적화할 수 있는 미래를 가리킵니다.
결과는 이동 패턴에 제어된 가변성을 도입하면 공장 바닥에서 도시 거리에 이르기까지 많은 실제 시스템의 흐름을 향상시킬 수 있음을 시사합니다.
주요 시사점
- 하버드 SEAS 연구원들은 많은 수의 로봇이 동일한 공간에서 작동할 때 움직임에 무작위성을 제어하면 효율성을 크게 향상시킬 수 있다는 사실을 발견했습니다.
- 이 연구는 중앙 통제 없이도 얼마나 단순한 로컬 이동 규칙이 놀랍도록 복잡하고 잘 조정된 그룹 행동을 생성할 수 있는지 강조합니다.
- 이 작업에서 개발된 수학적 모델은 로봇 무리의 설계를 최적화하고 도시, 교통 시스템, 공공 장소와 같은 혼잡한 환경을 관리하는 방법을 개선하는 데 도움이 될 수 있습니다.
연구에 대한 자금은 Simons Foundation 및 Henri Seydoux Fund의 보조금과 함께 보조금 번호 DGE 2140743의 국립 과학 재단 대학원 연구 펠로우십 프로그램에서 나왔습니다.
출처: https://www.sciencedaily.com/releases/2026/04/260414075639.htm
답글 남기기